
Картоплезбиральний комбайн 4UL-170D з функцією фасовки в мішки ton-bag може виконувати однопрохідне копання картоплі, відділення картоплі від ґрунту, відділення картоплі від лоз, ручний збір та очищення, централізований збір та транспортування, а також пакування в мішки. Він може збирати врожай у двох рядах одночасно, досягаючи ефективності понад 0,33 гм²/год, з мінімальними втратами, низьким рівнем пошкодження шкірки, незначним пошкодженням картоплі та низьким вмістом домішок.



Картоплекопальний комбайн 4UL-170D з мішками може виконувати однопрохідне копання картоплі, відділення картоплі від ґрунту, відділення картоплі від лоз, ручний збір та очищення, централізований збір та транспортування, а також пакування в мішки. Він може збирати врожай у двох рядах одночасно, досягаючи ефективності понад 0,33 г/м²/год, з мінімальними втратами, низьким рівнем пошкодження шкірки, незначним пошкодженням картоплі та низьким вмістом домішок.
Конструкція машини:
Картоплекопальний комбайн 4UL-170D з мішками є причіпним. Його основна конструкція складається з тягової рами, копального пристрою, основного транспортувального пристрою, гідравлічного вібраційного пристрою, пристрою для очищення ґрунту та видалення домішок, підйомно-перевантажувального пристрою, сортувального та транспортувального пристрою, буферного бункера, пристрою для транспортування матеріалу, пристрою для розвантаження тонн-пак, незалежного гідравлічного пристрою та пристрою з керуванням.
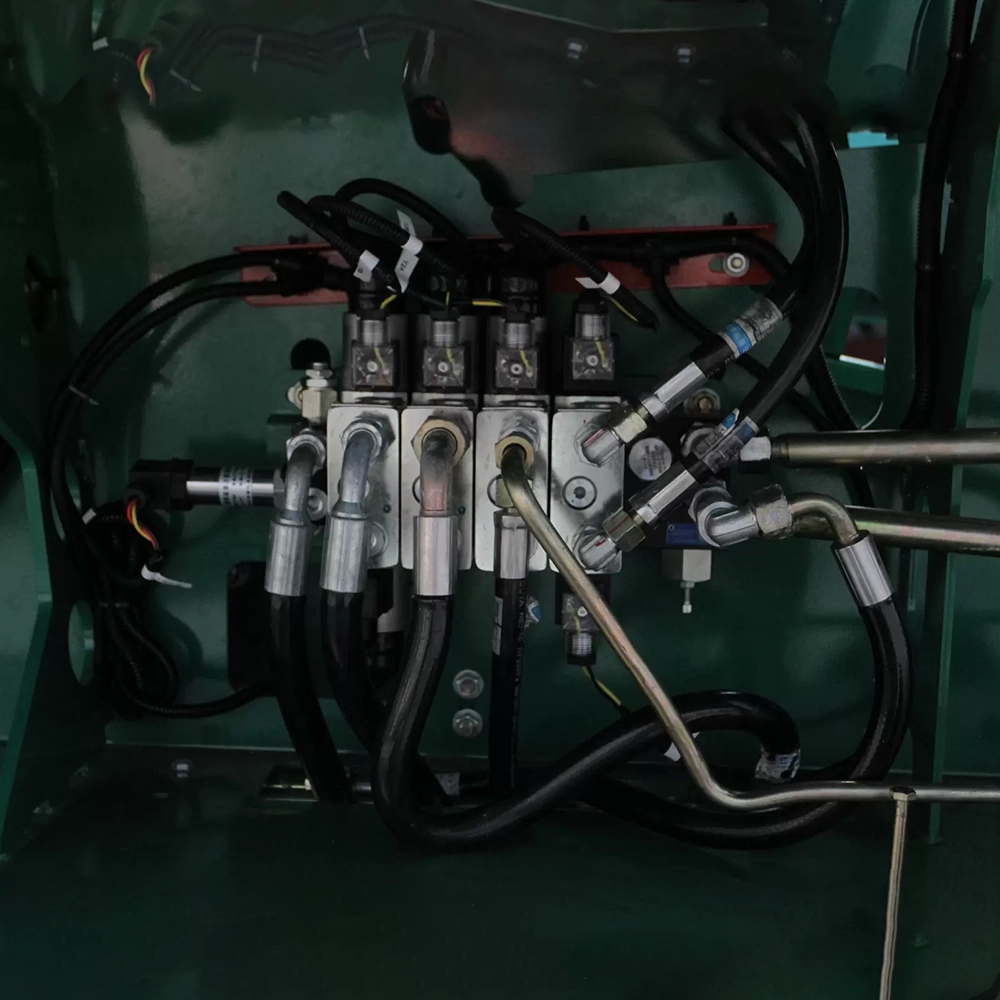
Картоплекопальний комбайн 4UL-170D використовує дві гідравлічні системи. Одна система використовує шестерний насос трактора як джерело гідравлічної енергії, що складається з головного гідравлічного клапана, різних допоміжних гідравлічних клапанів, гідродвигунів, гідроциліндрів та гідравлічних аксесуарів.
Головний клапан імпортної марки Bosch Rexroth, що дозволяє одночасно, швидко та точно керувати кількома приводами під різним тиском навантаження, причому кожен привід працює незалежно.
Інша гідравлічна система живиться від вихідного валу ВОМ трактора, приводячи в рух шестерний насос, гідравлічні керуючі клапани та гідродвигуни для керування підйомним грохотом.
Інтелектуальна система керування картопляним комбайном 4UL-170D включає ручку керування, дисплей, контролер та датчики, що дозволяє оператору та персоналу керувати машиною.
Системи відеоспостереження можуть контролювати критичні робочі процеси, дозволяючи операторам легко розуміти роботу машини.
Принцип роботи:
Під час роботи комбайна, що тягнеться трактором, копальний пристрій спочатку викопує посіви на гребенях. Під дією коліс, що повторюють контур і обмежують глибину, ґрунт на гребенях поступово розпушується. Ріжучі диски на обох кінцях зрізають лози, а копальна лопата викопує суміш культур, ґрунту та лози в первинний транспортний пристрій.
У первинному транспортному пристрої суміш картоплі, ґрунту та лози проходить розділення картоплі та ґрунту за допомогою гідравлічного вібраційного пристрою. Коли суміш досягає найвищої точки, вона безпосередньо потрапляє в пристрій для видалення ґрунту та сміття.
Пристрій для видалення ґрунту та сміття використовує гумові шнекові ролики, які обертаються назад. Вал для витягування лози встановлений між кожними двома наборами гумових шнекових роликів, відокремлюючи грудки ґрунту та бруд від суміші матеріалу.
Між пристроєм для видалення сміття та підйомним пристроєм встановлено ланцюгову сітку для витягування лози. Лози безпосередньо транспортуються за допомогою ланцюга для витягування лози. Відносно чиста картопля нарешті транспортується до верхньої конвеєрної стрічки за допомогою підйомного пристрою.
Ручне збирання та сортування видаляють будь-який залишок бруду, каміння або лози. Камені видаляються через... Картопля падає на землю через напрямний канал, де її очищають та поміщають у буферний бункер для упаковки.
Висота падіння картоплі на верхній конвеєрній стрічці регулюється автоматично, щоб запобігти її пошкодженню під час потрапляння в буферний бункер. У задній частині машини оператор пакування керує нижньою конвеєрною стрічкою, щоб швидко транспортувати чисту картоплю в тонні мішки, регулюючи висоту тонних мішків відносно нижньої конвеєрної стрічки за потреби. Після того, як тонкий мішок наповниться, його розвантажують з машини та кладуть на землю за допомогою нахилу.
Картоплезбиральний комбайн 4UL-170D з пакуванням є причіпним. Його конструкція має такі переваги:
1. Конструкція з лопатою дозволяє режим збору врожаю 2+2.
2. Електрогідравлічна система контролю вібрації дозволяє оператору регулювати частоту вібрації первинного грохота з кабіни за допомогою ручки.
3. Підйомний сітчастий конвеєр забезпечує хороше пропускання ґрунту та чистий матеріал.
4. Функція рульового керування тягою (ґрунтовим колесом) значно скорочує радіус повороту машини.
5. Ланцюг конвеєра для розсади та пристрій для видалення розсади зменшують кількість розсади та інших відходів, не пошкоджуючи картоплю.
6. Багатоступеневий спіральний гумовий ролик для видалення ґрунту та сміття ефективно видаляє ґрунт та сміття з поверхні картоплі та може бути реверсований за допомогою ручки.
7. Верхній конвеєрний пристрій має регульовану швидкість та регульовану висоту розвантажувального стріли. Швидкість конвеєрної стрічки можна регулювати залежно від кількості збирачів, а висоту розвантажувального стріли можна регулювати залежно від стану матеріалу в буферному бункері, щоб зменшити пошкодження картоплі.
8. Буферний бункер дозволяє безперервно збирати врожай та завантажувати мішки в тонни.
9. Нижній конвеєрний пристрій можна запускати та зупиняти, і він виконує функцію завантаження мішків в тонни. Персонал, що розвантажує мішки в тонни, використовує ручки для транспортування матеріалів з буферного бункера до мішків в тонни.
9. Нижній конвеєрний пристрій можна керувати для запуску та зупинки, і він виконує функцію завантаження тоннних мішків. Персонал, що розвантажує тоннні мішки, використовує ручки для транспортування матеріалів з буферного бункера до тоннних мішків, а також керує функціями підйому/опускання та нахилу/реверсу тоннних мішків. Розвантаження тоннних мішків відбувається швидко.
10. Ручний сортувальний та комплектуючий пристрій забезпечує вищий рівень чистоти картоплі в тоннних мішках.
11. Інтелектуальна електрогідравлічна система керування: усі дії картопляного комбайна виконуються оператором та персоналом, що розвантажує тонні мішки, за допомогою ручок керування.
12. Система відеомоніторингу: здатна контролювати ключові процеси, такі як розвантаження тоннних мішків, транспортування первинного грохота, заповнення буферного бункера та роботу очисних роликів.
13. За винятком первинного грохота, всі інші конвеєрні пристрої мають гідравлічний привод, що гарантує, що конвеєрна стрічка або інші компоненти не будуть пошкоджені у разі блокування.